Actualización: ¡El experimento Analog-1 fue un éxito total! El astronauta Parmitano completó todos los requisitos dentro del plazo especificado (una hora). Esta prueba es el primer paso para validar la tecnología de teleoperación.
La NASA ha sido bastante directa sobre su deseo de enviar astronautas a la Luna y a Marte en los próximos años. A ellos se unen múltiples agencias espaciales (como la ESA, Roscosmos, la CNSA y el IRSO) que también desean realizar sus primeras misiones tripuladas más allá de la Tierra. Sin embargo, lo que a menudo se pasa por alto es el papel que desempeñarán las misiones teleoperadas en el futuro cercano, donde los humanos y los robots exploran de la mano.
Por ejemplo, la ESA se ha embarcado en una serie de experimentos colectivamente llamados Analog-1, donde los astronautas controlan los robots desde el espacio. Ayer (18 de noviembre), el astronauta de la ESA Luca Parmitano tomó el control de un robot en los Países Bajos desde la EEI. Este experimento y otros similares ayudarán a preparar a los astronautas para futuras misiones que implicarán la exploración de entornos peligrosos fuera del mundo peligrosos o inaccesibles.
El rover (conocido como Interact) fue creado como parte del proyecto Multi-Purpose End to End Robotics Operations Network (METERON), que busca crear redes de comunicación, interfaces de robots y hardware para permitir a los astronautas controlar de forma remota los exploradores de robots desde la órbita. Estos robots serán capaces de explorar sitios de aterrizaje para futuras misiones, localizar recursos y preparar hábitats para astronautas.

La clave de este proceso es un "Internet espacial" especialmente desarrollado que puede conectar a un operador a ubicaciones de hasta 10,000 km (6,200 millas) de distancia, ya sea entre la órbita y la superficie o en ubicaciones distantes en la Tierra. Esta conexión le permitió a Luca permanecer en contacto con el rover, así como ver y sentir todo lo que experimentó, aunque con un retraso de tiempo.
Esto es crucial cuando se trata de teleoperación ya que los objetivos de exploración están muy lejos de la Tierra. Para operar de forma remota un rover lunar, los controladores de la misión tienen que lidiar con demoras de segundos o minutos. Desde la Tierra hasta la Luna, las señales solo tardan unos segundos en llegar y regresar. Pero para las misiones a Marte, el retraso puede ser de 4 a aproximadamente 24 minutos (dependiendo de dónde se encuentren la Tierra y Marte).
Al final, las conexiones convencionales solo permiten a los controladores de misión enviar comandos y recibir datos a cambio. El proyecto METERON, por otro lado, permite a los controladores ver e incluso sentir lo que hace el robot a pesar de un retraso de tiempo. El control se proporciona utilizando dos computadoras portátiles y un joystick Sigma7 de "retroalimentación de fuerza" con seis grados de movimiento. Este joystick háptico le permite al controlador experimentar lo que el rover mismo siente de su entorno.
Conectar el rover y el operador no es una tarea sencilla, ya que las señales de la ISS realizan un viaje de ida y vuelta de unos 144.400 km (89.725 millas). Mientras tanto, la ISS viaja alrededor de la Tierra a una velocidad de 29,000 km / h (18,000 mph). Estas señales se envían a una serie de satélites que se encuentran en órbitas de hasta 36,000 km (22,370 millas) desde la superficie.

Luego, las señales se transmiten a una estación terrestre estadounidense en Nuevo México, a Houston de la NASA, y luego a través de un cable transatlántico a Europa. Todo esto lleva a un retraso de tiempo bastante significativo, pero que es manejable gracias a la infraestructura avanzada construida por la NASA, la ESA y otras agencias asociadas.
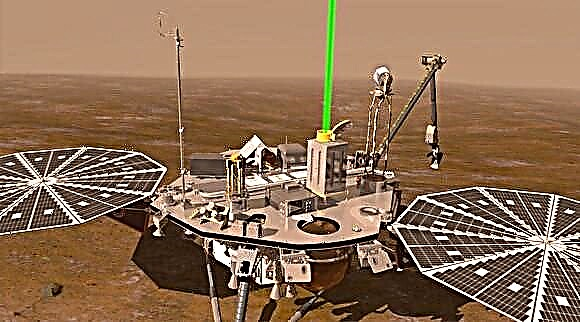
Las primeras sesiones vieron a Luca conduciendo el rover Interact a través de una carrera de obstáculos ubicada en un hangar en Valkenburg en los Países Bajos, cerca del Centro Europeo de Investigación y Tecnología de la ESA (ESTEC). Alrededor del campo se colocaron fondos con paisajes lunares, que consistían en una serie de conos colocados sobre el suelo diseñados para simular el regolito lunar.
El objetivo final es realizar este tipo de exploración a control remoto desde estaciones como Lunar Gateway o Mars Base Camp. Estas estaciones y la capacidad de teleoperar rovers en la superficie es un aspecto clave para establecer una presencia humana sostenible en la Luna y realizar misiones de exploración con tripulación a Marte, también conocido como. Plan Luna a Marte de la NASA.
El siguiente paso en el experimento Analog-1 consistirá en una simulación programada para aproximadamente una semana que involucrará un entorno lunar simulado completo. Esta prueba evaluará si un robot operado por humanos puede o no realizar estudios geológicos y exploraciones de lugares de difícil acceso.

Un equipo del Centro Europeo de Astronautas (EAC) en Colonia, Alemania, actuará como equipo científico y supervisará el experimento. Para completar la ilusión de una misión lunar, instruirán y asesorarán a Luca sobre posibles objetivos de investigación, que incluirán si las rocas lunares simuladas encontradas por el rover Interact merecen un mayor análisis científico o deben descartarse.
Ingenieros en Alemania están llevando a cabo experimentos análogos similares que están utilizando el sistema METERON para controlar un rover en Canadá. Estos experimentos no solo validan la sofisticada tecnología involucrada; También están demostrando el valor de la cooperación humano-robótica en el espacio, que desempeñará un papel central en los futuros planes de exploración.
Mientras tanto, los ministros de los Estados miembros de la ESA se reunirán a finales de este mes (27 y 28 de noviembre) en el Space19 + en Sevilla, España, para discutir los objetivos científicos de la Agencia para el futuro. Dada la importancia de las teleoperaciones y la tecnología que las respalda, METERON y los experimentos analógicos seguramente aparecerán.
Asegúrese de ver este video del rover Interact que se está teleoperando: